



4.7. Ejemplo de movimiento de precesión
De Laplace
Contenido |
1 Enunciado
El movimiento de precesión de una peonza puede describirse como una rotación en torno a un eje instantáneo que a su vez está rotando, manteniéndose fijo el punto de apoyo. Supongamos el caso particular


- Determine el campo de velocidades del sólido.
- Determine el campo de aceleraciones del sólido. ¿Es la aceleración de un punto igual a la derivada de la velocidad en ese punto respecto al tiempo?
- Halle, para cada instante las componentes intrínsecas de la aceleración y el radio de curvatura de los puntos

2 Campo de velocidades
Por tratarse de una rotación pura

Separando en componentes cartesianas

3 Campo de aceleraciones
El campo de aceleraciones tiene la expresión general

En este caso la aceleración de O es nula, por estar permanentemente en reposo, mientras que la aceleración angular vale
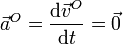

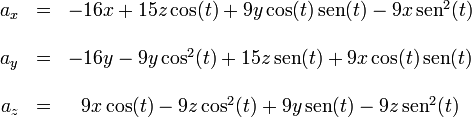
Sustituyendo y separando en componentes cartesianas obtenemos
Puede comprobarse de manera inmediata que
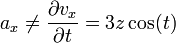
y lo mismo para el resto de las componentes: la aceleración de un punto no es igual a la derivada de la velocidad instantánea de dicho punto respecto al tiempo. La razón es que al tener una velocidad no solo cambia la velocidad porque varía t. También x, y y z varían al desplazarse la partícula y por tanto deben ser incluidas en la derivación respecto al tiempo mediante la regla de la cadena.

