4.7. Ejemplo de movimiento de precesión
De Laplace
Contenido |
1 Enunciado
El movimiento de precesión de una peonza puede describirse como una rotación en torno a un eje instantáneo que a su vez está rotando, manteniéndose fijo el punto de apoyo. Supongamos el caso particular


- Determine el campo de velocidades del sólido.
- Determine el campo de aceleraciones del sólido. ¿Es la aceleración de un punto igual a la derivada de la velocidad en ese punto respecto al tiempo?
- Halle, para cada instante las componentes intrínsecas de la aceleración y el radio de curvatura en el punto

2 Campo de velocidades
Por tratarse de una rotación pura

Separando en componentes cartesianas

3 Campo de aceleraciones
El campo de aceleraciones tiene la expresión general

En este caso la aceleración de O es nula, por estar permanentemente en reposo, mientras que la aceleración angular vale

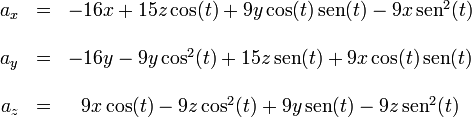
Sustituyendo y separando en componentes cartesianas obtenemos
Puede comprobarse de manera inmediata que
y lo mismo ocurre para el resto de las componentes. ¿Por qué pasa esto si sabemos que la aceleración de una partícula es la derivada de su velocidad respecto al tiempo? La razón es que no estamos derivando bien respecto al tiempo. La expresión de la velocidad no sólo depende del tiempo explícitamente, sino que también lo hace de forma implícita a través de las coordenadas posicionales x, y y z, las cuales varían al desplazarse la partícula. Por tanto, si se desea obtener la aceleración a partir de la velocidad, será necesario realizar la derivada total respecto al tiempo utilizando la regla de la cadena.
4 Componentes intrínsecas
Particularizando para x = y = 0, z = 1 obtenemos


Una vez que tenemos los vectores velocidad aceleración podemos hallar las componentes intrínsecas de la aceleración.
- Aceleración tangencial
- Proyectando sobre la velocidad
- Aceleración normal
- Puesto que la aceleración tangencial es nula, toda la aceleración es normal

- Radio de curvatura
- Es inmediato conocida la aceleración normal y la celeridad