



Dos discos y barra rodando sin deslizar
De Laplace
(→Ley horaria de los centros de los discos) |
(→Movimiento relativo de los discos) |
||
| Línea 169: | Línea 169: | ||
==Movimiento relativo de los discos== | ==Movimiento relativo de los discos== | ||
| + | |||
| + | === Reducción del movimiento {20} === | ||
| + | Para determinar la reducción cinemática del movimiento {20} usamos la composición | ||
| + | <center> | ||
| + | <math> | ||
| + | \{21\} = \{20\} + \{01\} | ||
| + | </math> | ||
| + | </center> | ||
| + | Para la velocidad angular | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{\omega}_{21} = \vec{\omega}_{20} + \vec{\omega}_{01} \Longrightarrow \vec{\omega}_{20} = \vec{\omega}_{21} - \vec{\omega}_{01} = -\frac{\displaystyle v_0}{\displaystyle 2R}\vec{k} | ||
| + | </math> | ||
| + | </center> | ||
| + | |||
| + | Buscamos ahora la velocidad <math>\vec{v}_{20}^D </math>. Tenemos | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{v}_{21}^D = \vec{v}_{20}^D + \vec{v}_{01}^D \Longrightarrow \vec{v}_{20}^D = \vec{v}_{21}^D - \vec{v}_{01}^D | ||
| + | </math> | ||
| + | </center> | ||
| + | De los apartados anteriores tenemos | ||
| + | <center> | ||
| + | <math> | ||
| + | \begin{array}{lll} | ||
| + | \vec{v}_{21}^D &=& v_0\,\vec{\imath}_1 \\ | ||
| + | \vec{v}_{01}^D &=& \vec{v}_{01}^C + \vec{\omega}_{01}\times\overrightarrow{CD}= \frac{\displaystyle v_0}{\displaystyle 2}\,\vec{\imath}_1 + \frac{\displaystyle 3v_0}{\displaystyle 2}\,\vec{\jmath}_1 | ||
| + | \\ | ||
| + | &&\\ | ||
| + | && \vec{v}_{01}^C = v_0\,\vec{\imath}_1\\ | ||
| + | &&\\ | ||
| + | && \overrightarrow{CD} = -3R\,\vec{\imath}_1 - R\,\vec{\jmath}_1 \Longrightarrow \vec{\omega}_{01}\times\overrightarrow{CD} = | ||
| + | -\frac{\displaystyle v_0}{\displaystyle 2}\,\vec{\imath}_1 + \frac{\displaystyle 3v_0}{\displaystyle 2}\,\vec{\jmath}_1 | ||
| + | \end{array} | ||
| + | </math> | ||
| + | </center> | ||
| + | De este modo la reducción en el punto <math>D </math> es | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{\omega}_{20} = -\frac{\displaystyle v_0}{\displaystyle 2R}\,\vec{k} \qquad\qquad\qquad \vec{v}_{20}^D = \frac{\displaystyle v_0}{\displaystyle 2}\,\vec{\imath}_1 - \frac{\displaystyle 3v_0}{\displaystyle 2}\,\vec{\jmath}_1 | ||
| + | </math> | ||
| + | </center> | ||
| + | |||
| + | === Cálculo de <math>\vec{a}_{20}^D </math> === | ||
| + | |||
| + | Usando la misma composición de movimientos tenemos | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{a}_{21}^D = \vec{a}_{20}^D + \vec{a}_{01}^D + 2\vec{\omega}_{01}\times\vec{v}_{20}^D \Longrightarrow \vec{a}_{20}^D = \vec{a}_{21}^D - \vec{a}_{01}^D - 2\vec{\omega}_{01}\times\vec{v}_{20}^D | ||
| + | </math> | ||
| + | </center> | ||
| + | Veamos cuanto valen cada uno de los sumandos. | ||
| + | |||
| + | Dado que <math>\vec{v}_{21}^D=v_0\,\vec{\imath}_1 </math> es un vector constante, <math>\vec{a}_{21}^D=\vec{0} </math>. | ||
| + | |||
| + | Por la misma razon, como <math>\vec{v}_{01}^C=v_0\,\vec{\imath}_1 </math> es un vector constante, | ||
| + | <math>\vec{a}_{01}^C=\vec{0} </math> y también <math>\vec{\alpha}_{01}=\vec{0} </math>. Usando la ecuación del campo de aceleraciones del movimiento {01}, | ||
| + | teniendo en cuenta que es un movimiento plano, tenemos | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{a}_{01}^D = \vec{a}_{01}^C + \vec{\alpha}_{01}\times\overrightarrow{CD} - \omega_{01}^2\overrightarrow{CD} | ||
| + | = \frac{\displaystyle 3v_0^2}{\displaystyle 4R}\,\vec{\imath}_1 + \frac{\displaystyle v_0^2}{\displaystyle 4R}\,\vec{\jmath}_1 | ||
| + | </math> | ||
| + | </center> | ||
| + | |||
| + | Por último tenemos | ||
| + | <center> | ||
| + | <math> | ||
| + | 2\vec{\omega}_{01}\times\vec{v}_{20}^D = -\frac{\displaystyle 3v_0^2}{\displaystyle 2R}\,\vec{\imath}_1 - \frac{\displaystyle v_0^2}{\displaystyle 2R}\,\vec{\jmath}_1 | ||
| + | </math> | ||
| + | </center> | ||
| + | |||
| + | Entonces | ||
| + | <center> | ||
| + | <math> | ||
| + | \vec{a}_{20}^D = \frac{\displaystyle 3v_0^2}{\displaystyle 4R}\,\vec{\imath}_1 + \frac{\displaystyle v_0^2}{\displaystyle 4R}\,\vec{\jmath}_1 | ||
| + | </math> | ||
| + | </center> | ||
Revisión de 13:25 27 sep 2010
Contenido |
1 Enunciado
Sendos discos de radios radios 2R y R (sólidos “0” y “2”, respectivamente) se encuentran siempre contenidos en el mismo plano y en contacto puntual sobre el sólido fijo “1”. Además, hay una barra rígida (sólido “3”), también contenida en el plano de los discos y en contacto puntual con éstos. El sistema se mueve de manera que los discos “0” y “2” ruedan sin deslizar de manera simultánea sobre los sólidos “1” y “3”.
- Determine los C.I.R. de los diferentes movimientos relativos en el sistema descrito. ¿Cómo es el movimiento instantáneo de la barra “3” respecto del sólido fijo “1”?
- Suponiendo que en el movimiento del disco de mayor radio respecto del sólido fijo la velocidad de su centro C es un vector constante de valor conocido
 , determine las reducciones cinemáticas de los movimientos {01}, {31} y {21}.
, determine las reducciones cinemáticas de los movimientos {01}, {31} y {21}.
- Determine la ley horaria que sigue la distancia
 entre los puntos de contacto de los discos con el sólido fijo. Supóngase que en el instante inicial esta distancia es 3R.
entre los puntos de contacto de los discos con el sólido fijo. Supóngase que en el instante inicial esta distancia es 3R.
- Determine la reducción cinemática del movimiento relativo del disco pequeño respecto del grande, {20}. Calcule la aceleración instantánea del centro D en dicho movimiento.

2 C.I.R. de los movimientos
Las posiciones que en un instante dado ocupan los centros instantáneos de rotación (C.I.R.) de los movimientos planos realizados por los discos “0” y “2” respecto del sólido fijo “1” y de la barra “3” se determinan de manera inmediata: en la descripción del movimiento del sistema se indica que los discos siempre ruedan sin deslizar sobre sólido y fijo y barra. Por tanto, las velocidades relativas de los puntos de contacto son nulas y, en consecuencia, éstos coinciden con los C.I.R. correspondientes a dichos movimientos.
Denominemos  al C.I.R. del movimiento
al C.I.R. del movimiento  ; si en un determinado instante A y B son los puntos de contacto de los discos “0” y “2” con la barra “3”, y los puntos
E y F donde aquéllos establecen contacto con el sólido fijo “1”, se tendrá:
; si en un determinado instante A y B son los puntos de contacto de los discos “0” y “2” con la barra “3”, y los puntos
E y F donde aquéllos establecen contacto con el sólido fijo “1”, se tendrá:




Aún quedan por obtener los C.I.R.  e
e  correspondientes al movimiento relativo del del disco pequeño respecto del grande, y al de la barra respecto del sólido fijo de referencia, respectivamente. La posición de estos puntos en el instante arbitrario reflejado en la figura puede ser fácilmente determinada mediante el teorema de los tres centros.
correspondientes al movimiento relativo del del disco pequeño respecto del grande, y al de la barra respecto del sólido fijo de referencia, respectivamente. La posición de estos puntos en el instante arbitrario reflejado en la figura puede ser fácilmente determinada mediante el teorema de los tres centros.
2.1 Aplicación del Teorema de los tres centros
Como sabemos, dicho teorema establece que si tres sólidos realizan movimientos relativos planos, con idéntico plano director, las posiciones que ocupan los C.I.R. en un instante están alineadas. En el sistema bajo estudio esto significa que el C.I.R. del movimiento  (punto ) debe estar en la misma recta que los de los movimientos
(punto ) debe estar en la misma recta que los de los movimientos  y
y  ; es decir, en el instante de la figura debe estar en la recta Δ(E,F), definida por los puntos E y F. Pero, simultáneamente, debe pertenecer a la recta Δ(A,B), que pasa por los puntos de contacto A y B, pues son las posiciones de los C.I.R. de los movimientos
; es decir, en el instante de la figura debe estar en la recta Δ(E,F), definida por los puntos E y F. Pero, simultáneamente, debe pertenecer a la recta Δ(A,B), que pasa por los puntos de contacto A y B, pues son las posiciones de los C.I.R. de los movimientos  y
y  . Por tanto, el C.I.R. se encuentra en la intersección de dichas rectas (ver figura):
. Por tanto, el C.I.R. se encuentra en la intersección de dichas rectas (ver figura):


Análogamente, el C.I.R. del movimiento  (punto ) debe estar alineado con los puntos A y E, al coincidir éstos con los C.I.R. de los movimientos
(punto ) debe estar alineado con los puntos A y E, al coincidir éstos con los C.I.R. de los movimientos  y (recuérdese que
y (recuérdese que  ). Pero además, dicho punto debe estar en la recta Δ(A,F), que pasa por los centros de los movimientos
). Pero además, dicho punto debe estar en la recta Δ(A,F), que pasa por los centros de los movimientos  y . Por tanto, el C.I.R. I31 se encuentra
en la intersección de las rectas Δ(BF) y Δ(AE). Pero estas rectas son paralelas. Esto puede deducirse del hecho
de que los triángulos I20FB y I20EA son semejantes, pues el ángulo en el vértice I20 es el mismo y los lados concurrentes en ese vértice son proporcionales. Dos rectas paralelas se cortan en el infinito. Es decir, El C.I.R. I31 se
encuentra en el infinito en dirección de la recta Δ(BF). Por tanto el movimiento es una traslación instantánea.
y . Por tanto, el C.I.R. I31 se encuentra
en la intersección de las rectas Δ(BF) y Δ(AE). Pero estas rectas son paralelas. Esto puede deducirse del hecho
de que los triángulos I20FB y I20EA son semejantes, pues el ángulo en el vértice I20 es el mismo y los lados concurrentes en ese vértice son proporcionales. Dos rectas paralelas se cortan en el infinito. Es decir, El C.I.R. I31 se
encuentra en el infinito en dirección de la recta Δ(BF). Por tanto el movimiento es una traslación instantánea.

3 Reducciones cinemáticas
3.1 Movimiento {01}
Al ser un movimiento plano la velocidad angular está en la dirección del eje OZ. Por tanto
Del enunciado del problema conocemos la velocidad del centro del disco "0" ( ) y del punto de contacto
del disco con el suelo (
) y del punto de contacto
del disco con el suelo (  , pues rueda sin deslizar). Usamos la ecuación del campo de velocidades del movimiento
{01} para relacionar la velocidad de estos dos puntos
, pues rueda sin deslizar). Usamos la ecuación del campo de velocidades del movimiento
{01} para relacionar la velocidad de estos dos puntos

Es decir, la reducción en el punto C es

3.2 Movimiento {31}
Este movimiento es una traslación instantánea. Por tanto

Basta determinar la velocidad en uno de los puntos del sólido "3". Lo más sencillo es hacerlo en el punto A, pues este punto es el
C.I.R. I30 y por tanto  . Usando la composición de movimientos {31}={30}+{01} tenemos
. Usando la composición de movimientos {31}={30}+{01} tenemos

Utilizando la reducción cinemática del movimiento {01}

A partir del dibujo tenemos

Por tanto, la reducción es

Podemos ver que el resultado es razonable considerando el caso en el que el radio de los dos discos fuese el mismo. En ese caso tendríamos
α = 0 y la velocidad de la barra sería  , es decir, la del punto superior del disco "0"
, como debe ser, pues el movimiento de la barra sería puramente horizontal.
, es decir, la del punto superior del disco "0"
, como debe ser, pues el movimiento de la barra sería puramente horizontal.
3.3 Movimiento {21}
El vector rotación es de la forma

Para determinar ω21 necesitamos la velocidad en dos puntos. Dado que el disco "2" rueda sin deslizar sobre el suelo tenemos

Por otro lado, el punto de contacto entre la barra y el disco "2" es el C.I.R. I32, por lo que  . Usando la composición de movimientos {21}={23}+{31} tenemos
. Usando la composición de movimientos {21}={23}+{31} tenemos

Hemos utilizado que el movimiento {31} es una traslación y la velocidad es la misma en todos los puntos. Ahora usamos la ecuación del campo de
velocidades del movimiento {21} para relacionar  y
y  .
.

Del dibujo

Por tanto

Comparando con la expresión anterior de obtenemos ω21 = − v0 / R. La reducción cinemática en el punto
F es

Nos interesa obtener  . A partir de la ecuación del campo de velocidades del movimiento {21} tenemos
. A partir de la ecuación del campo de velocidades del movimiento {21} tenemos

Otra forma de obtener esta reducción es relacionar  con , sabiendo que, como se
indica en el dibujo,
con , sabiendo que, como se
indica en el dibujo,  . De la ecuación del campo de velocidades se obtienen dos ecuaciones para
dos incógnitas, ω21 y
. De la ecuación del campo de velocidades se obtienen dos ecuaciones para
dos incógnitas, ω21 y  . Resolviéndolas se obtiene el mismo resultado.
. Resolviéndolas se obtiene el mismo resultado.
4 Ley horaria de los centros de los discos
Como hemos visto en el apartado anterior, las velocidades absolutas de los centros de los discos son iguales

Como se mueven con la misma velocidad, la distancia entre esos dos puntos permanece constante e igual a la inicial. La ley horaria es
Δx(t) = Δx(t = 0) = 3R
5 Movimiento relativo de los discos
5.1 Reducción del movimiento {20}
Para determinar la reducción cinemática del movimiento {20} usamos la composición
{21} = {20} + {01}
Para la velocidad angular

Buscamos ahora la velocidad  . Tenemos
. Tenemos

De los apartados anteriores tenemos
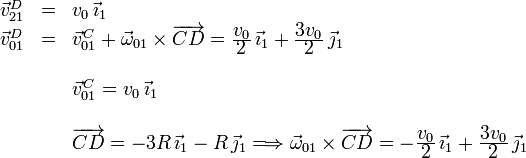
De este modo la reducción en el punto D es

5.2 Cálculo de 
Usando la misma composición de movimientos tenemos

Veamos cuanto valen cada uno de los sumandos.
Dado que  es un vector constante,
es un vector constante,  .
.
Por la misma razon, como  es un vector constante,
es un vector constante,
 y también
y también  . Usando la ecuación del campo de aceleraciones del movimiento {01},
teniendo en cuenta que es un movimiento plano, tenemos
. Usando la ecuación del campo de aceleraciones del movimiento {01},
teniendo en cuenta que es un movimiento plano, tenemos

Por último tenemos

Entonces


