



Tres masas en un triángulo (CMR)
De Laplace
| Línea 54: | Línea 54: | ||
Este sería el código que lo hace en Mathematica (muy poco optimizado, pero para que se entienda mejor) | Este sería el código que lo hace en Mathematica (muy poco optimizado, pero para que se entienda mejor) | ||
| - | < | + | <code> |
J[m_, P_] := m (P . P IdentityMatrix[3] - KroneckerProduct[P, P]) | J[m_, P_] := m (P . P IdentityMatrix[3] - KroneckerProduct[P, P]) | ||
| Línea 61: | Línea 61: | ||
OP = {{0, 0, 0}, {3 b, 0, 0}, {0, 4 b, 0}} | OP = {{0, 0, 0}, {3 b, 0, 0}, {0, 4 b, 0}} | ||
| - | OG = Sum[lm | + | OG = Sum[lm[[i]] OP[[i]], {i, 3}]/Sum[lm[[i]], {i, 3}] |
| - | GP = Table[OP | + | GP = Table[OP[[i]] - OG, {i, 3}] |
| - | Sum[J[lm | + | Sum[J[lm[[i]], GP[[i]]], {i, 3}] // MatrixForm |
</nowiki> | </nowiki> | ||
Revisión de 15:39 11 ene 2021
Contenido |
1 Tres masas en un triángulo
Un sólido rígido está formado por tres masas: una 5m, situada en O(0,0,0), una 4m, en A(3b,0,0) y una 3m, en B(0,4b,0).
- ¿En qué posición se encuentra el centro de masas del sistema?
- ¿Cuánto vale el tensor de inercia de este sólido respecto a unos ejes paralelos a OX, OY y OZ, por el centro de masas?
- Si el sólido está girando en torno a un eje que pasa por el CM y con velocidad angular

- su momento cinético respecto a G.
- su momento cinético respecto a O.
- su energía cinética.
2 Centro de masas
La posición del CM es la media ponderada de las posiciones de las tres masas

3 Tensor de inercia
Para hallar el tensor de inercia tenemos dos caminos.
- Directamente mediante las posiciones de las tres partículas respecto a los nuevos ejes.
- Hallando primero el tensor respecto a unos ejes por O y posteriormente aplicar el teorema de Steiner.
Veámoslo de las dos formas.
3.1 Directamente
La posición de las tres masas respecto al CM es, para O

para A

y para B

Aplicamos ahora la definición de tensor de inercia
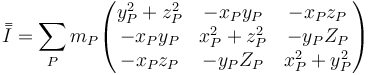
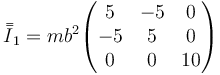
queda para la masa de O, de valor 5m
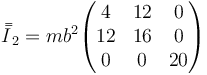
Para la de A, de valor 4m
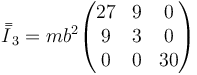
y para la de C, de valor 3M
Sumando los tres tensores

Este sería el código que lo hace en Mathematica (muy poco optimizado, pero para que se entienda mejor)
J[m_, P_] := m (P . P IdentityMatrix[3] - KroneckerProduct[P, P])
lm = {5 m, 4 m, 3 m}
OP = {{0, 0, 0}, {3 b, 0, 0}, {0, 4 b, 0}}
OG = Sum[lm[[i]] OP[[i]], {i, 3}]/Sum[lm[[i]], {i, 3}]
GP = Table[OP[[i]] - OG, {i, 3}]
Sum[J[lm[[i]], GP[[i]]], {i, 3}] // MatrixForm </nowiki>

