



Rotaciones de un sólido rígido
De Laplace
(→Expresión de las rotaciones) |
(→Expresión de las rotaciones) |
||
| Línea 61: | Línea 61: | ||
Al mismo tiempo, la rotación inversa es la que pasa del sistema fijo al ligado, por lo que llegamos a que la matriz de rotación tiene por filas las componentes de la base fija en la base ligada | Al mismo tiempo, la rotación inversa es la que pasa del sistema fijo al ligado, por lo que llegamos a que la matriz de rotación tiene por filas las componentes de la base fija en la base ligada | ||
| - | <center><math>\overline{\overline{R}}^-1= \overline{\overline{R}}^T \begin{pmatrix} \uparrow & \uparrow & \uparrow \\ \vec{\imath}_1 & \vec{\jmath}_1 & \vec{k}_1 \\ \downarrow & \downarrow & \downarrow\end{pmatrix}\qquad\Rightarrow\qquad \overline{\overline{R}}= \begin{pmatrix}\leftarrow & \vec{\imath}_1 & \rightarrow \\ \leftarrow & \vec{\jmath}_1 & \rightarrow \\ \leftarrow & \vec{k}_1 & \rightarrow \end{pmatrix}</math></center> | + | <center><math>\overline{\overline{R}}^{-1}= \overline{\overline{R}}^T \begin{pmatrix} \uparrow & \uparrow & \uparrow \\ \vec{\imath}_1 & \vec{\jmath}_1 & \vec{k}_1 \\ \downarrow & \downarrow & \downarrow\end{pmatrix}\qquad\Rightarrow\qquad \overline{\overline{R}}= \begin{pmatrix}\leftarrow & \vec{\imath}_1 & \rightarrow \\ \leftarrow & \vec{\jmath}_1 & \rightarrow \\ \leftarrow & \vec{k}_1 & \rightarrow \end{pmatrix}</math></center> |
====Rotación respecto a un eje arbitrario==== | ====Rotación respecto a un eje arbitrario==== | ||
Revisión de 20:26 27 oct 2017
Contenido |
1 Concepto de rotación
Un sólido rígido experimenta una rotación cuando como resultado del movimiento uno de sus puntos mantiene su posición invariante
2 Rotaciones finitas
2.1 Expresión de las rotaciones
Supongamos que en una rotación el punto fijo es O, que tomaremos como origen de coordenadas. En una rotación, cualquier punto pasará de la posición

a la posición

Deseamos establecer la relación entre estos dos vectores.
Para ello, emplearemos dos sistemas de referencia. El sistema fijo “1” es el que consideramos inmóvil y respecto al cual se mueve el sólido. Los dos vectores que acabamos de escribir estarían expresados en la base 1. El sistema ligado “2” es uno móvil que gira solidariamente con el cuerpo en todo momento (es decir, es equivalente a él).
En ese caso, al estar ligado al sólido, la posición de los puntos de éste son constantes en todo momento. Es decir, la posición de P

con x, y, z funciones del tiempo se expresará en la base 2

con X, Y y Z constantes (pero  funciones del tiempo). Nótese que en ambos casos se trata del mismo vector, expresado en dos bases distintas.
funciones del tiempo). Nótese que en ambos casos se trata del mismo vector, expresado en dos bases distintas.

2.1.1 Rotación en torno a OZ
En el caso simple de una rotación de un ángulo θ en torno al eje OZ la relación entre ambas bases es
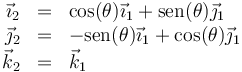
Si llevamos esto a las dos expresiones del vector de posición queda

que podemos escribir en la forma matricial
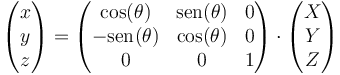
Este es un caso particular de matriz de rotación. Si tenemos en cuenta que (X,Y,Z) son también las coordenadas de la posición inicial en el sistema fijo, podemos decir que el paso de la posición inicial a la final se hace mediante la matriz de rotación.

En esta matriz, las columnas representan las componentes de los vectores de la base ligada respecto a la base fija

La rotación inversa es la que devuelve a los ejes a la posición original. Esto se consigue mediante una rotación de −θ, con matriz
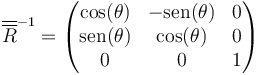
Esta es la traspuesta de la anterior, por lo que en este caso se cumple

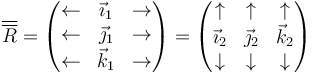
Al mismo tiempo, la rotación inversa es la que pasa del sistema fijo al ligado, por lo que llegamos a que la matriz de rotación tiene por filas las componentes de la base fija en la base ligada

2.1.2 Rotación respecto a un eje arbitrario
El mismo principio se aplica a
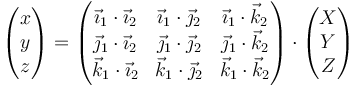
Para hallar las componentes en la base 1 proyectamos sobre cada vector de esta base

y análogamente para las otras dos componentes. Podemos escribir este resultado en forma matricial
que podemos abreviar como
donde  es la matriz de rotación que relaciona las componentes iniciales del vector de posición (o las que tiene en una base ligada al sólido) con las que tiene en un instante posterior. Esta matriz será función del tiempo.
es la matriz de rotación que relaciona las componentes iniciales del vector de posición (o las que tiene en una base ligada al sólido) con las que tiene en un instante posterior. Esta matriz será función del tiempo.
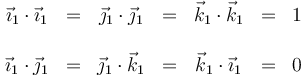
Vemos que los elementos de la matriz de rotación son los productos escalares entre los vectores de la base fija en el sólido y la fija en el laboratorio. Por ser unitarios todos los vectores estos elementos son los cosenos directores

Asmismo, cada fila corresponde a las componentes de un vector de la base fija (1) expresado en la base ligada al sólido (2), y cada columna un vector de la base ligada al sólido expresado en la base fija. Simbólicamente
2.1.3 Propiedades de la matriz de rotación
- Tiene tres grados de libertad
- De acuerdo con la expresión anterior, parece que para expresar una rotación hay que proporcionar 9 parámetros, esto es, que tiene 9 grados de libertad. No es así, ya que tenemos seis vínculos entre las componentes. Por ser ortonormal cada base
- Estos seis vínculos reducen el número de grados de libertad a 3, que pueden ser tres ángulos de orientación, como los ángulos de Euler.
- Es ortogonal
- Una matriz es ortogonal cuando su traspuesta coincide con su inversa. Si una rotación dada lleva de la base 1 a la base 2, la rotación inversa será la que devuelve la base 2 a la base 1. Por la construcción de la matriz, el intercambiar 1 por 2 equivale a intercambiar filas por columnas, esto es, hallar la traspuesta. Por tanto

- (empleamos
 en vez de
en vez de  , para reservar esta letra para los momentos de inercia) Esta propiedad equivale a lo que hemos mencionado de que las dos bases 1 y 2 son bases ortonormales.
, para reservar esta letra para los momentos de inercia) Esta propiedad equivale a lo que hemos mencionado de que las dos bases 1 y 2 son bases ortonormales.
- Es unitaria
- Una matriz es unitaria si su determinante vale la unidad. Es consecuencia inmediata de lo anterior

- La raíz negativa la descartamos, ya que corresponde a las simetrías, que hemos considerado como imposibles en el movimiento de un sólido real.
2.1.4 Teorema de Euler. Eje de rotación
Hemos definido como un movimiento rígido que deja un punto fijo. Euler demostró que esto implica que no hay un solo punto fijo, sino toda una recta que pasa por O. Esta recta es el llamado eje de rotación.
La demostración se basa en que debe haber un vector no afectado por la rotación, esto es,

Si este vector  existe, cualquier múltiplo de él tampoco se verá afectado, con lo que obtenemos toda una recta que pasa por O.
existe, cualquier múltiplo de él tampoco se verá afectado, con lo que obtenemos toda una recta que pasa por O.
En términos algebraicos esto equivale a decir que existe un autovalor unidad, siendo el autovector correspondiente. La condición para que ello ocurra es que

Veamos que es cierto:

y por tanto

Por tanto existe el autovalor unidad, y el autovector correspondiente nos da el eje de rotación.
Esto nos da otra forma de parametricar las rotaciones: con dos ángulos (por ejemplo los de las coordenadas esféricas) damos la orientación de este vector director y con un tercer ángulo medimos cuánto ha girado el sólido en torno al eje.
Como consecuencia del teorema de Euler, cualquier vector perpendicular al eje de giro sigue siendo perpendicular tras la rotación. Si el vector  se transforma en el
se transforma en el 

Cualquier otro vector podrá descomponerse en una parte paralela al eje de giro (que no se verá afectada por la rotación) más una parte ortogonal al eje (que gira un cierto ángulo en torno al eje, manteniéndose ortogonal).

