



Giro de un triedro (G.I.A.)
De Laplace
(Página creada con '== Enunciado == right Los triedros <math>O_1X_1Y_1Z_1</math> y <math>OX_0Y_0Z_0</math> están definidos de modo que sus orígenes y los e…') |
(→Derivada del vector \vec{B}) |
||
| Línea 127: | Línea 127: | ||
Ahora hay dos términos de variación, uno asociado al cambio en la longitud del vector (el | Ahora hay dos términos de variación, uno asociado al cambio en la longitud del vector (el | ||
primer sumando) y otro asociado a la rotación del triedro "0" (el segundo sumando) | primer sumando) y otro asociado a la rotación del triedro "0" (el segundo sumando) | ||
| + | [[Categoría:Problemas de movimiento relativo]] | ||
última version al 17:59 7 ene 2015
Contenido |
1 Enunciado

Los triedros O1X1Y1Z1 y OX0Y0Z0 están definidos de modo que sus orígenes y los ejes O1Z1 coinciden. El triedro "1" está en reposo y el triedro "0" gira respecto al "1" con velocidad angular uniforme  , de modo que el ángulo θ indicado en la figura es
, de modo que el ángulo θ indicado en la figura es  .
.
- Calcula las derivadas de los vectores de la base del triedro "0" vistos desde el triedro "1".
- Dado el vector
 calcula
calcula

- Expresa el resultado en los vectores de la base móvil (triedro "0") y la base fija (triedro "1").
- Haz el mismo cálculo para el vector

2 Solución
2.1 Derivada temporal de los vectores de la base móvil
El sólido "0" rota respecto al sólido "1" con una velocidad angular
 , con ω
constante. Hemos usado el hecho de que los ejes OZ0 y O1Z1, coinciden en todo
instante, por lo que se cumple
, con ω
constante. Hemos usado el hecho de que los ejes OZ0 y O1Z1, coinciden en todo
instante, por lo que se cumple  . Los vectores de la base móvil son
. Los vectores de la base móvil son  ,
,  y
y  ,
indicados en la figura. Estos vectores son solidarios con el triedro "0". Por tanto, al
girar éste se mueven respecto al triedro "1". La derivada temporal respecto del sistema
"1" se calcula usando las fórmulas de Poisson. Para un vector
,
indicados en la figura. Estos vectores son solidarios con el triedro "0". Por tanto, al
girar éste se mueven respecto al triedro "1". La derivada temporal respecto del sistema
"1" se calcula usando las fórmulas de Poisson. Para un vector  solidario con el sólido
"i", que rota respecto a un sólido "j" con velocidad angular
solidario con el sólido
"i", que rota respecto a un sólido "j" con velocidad angular  , su derivada
respecto al tiempo es
, su derivada
respecto al tiempo es
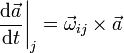
Aplicamos esta fórmula a los vectores de la base del triedro "0"
La derivada indica en que dirección y sentido gira la punta de cada uno de los vectores.
2.2 Derivada del vector 
Calculamos primero la derivada del vector  vista desde el triedro móvil.
En este triedro los vectores de la base son constantes, pues se mueven solidariamente con
él. Tenemos
vista desde el triedro móvil.
En este triedro los vectores de la base son constantes, pues se mueven solidariamente con
él. Tenemos

La derivada total es cero pues a es una constante y el vector no cambia visto
desde el sólido "0". El resultado es razonable, pues el vector gira con el
triedro "0" y por tanto la derivada respecto de él es nula.
Calculamos ahora la derivada respecto al triedro "1". Ahora hay que tener en cuenta la rotación del triedro "0" respecto al "1". Usando la fórmula general de Poisson tenemos

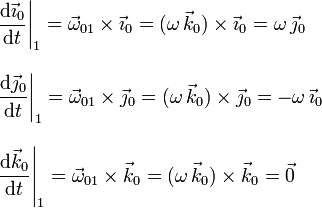
Hemos obtenido la derivada expresada en la base del triedro "0". Para expresarla en la base fija hemos de encontrar las expresiones de los vectores de la base "0" en la base "1". Si nos fijamos en la figura del enunciado, vemos que se cumple
Como el enunciado nos dice que la rotación tiene velocidad angular uniforme, se cumple
 . Con esto, la derivada del vector expresada en la
base del triedro fijo es
. Con esto, la derivada del vector expresada en la
base del triedro fijo es

Podíamos haber calculado esta derivada de otro modo expresando desde el principio el
vector en la base fija. Usando la relación entre los vectores de la base
del triedro "0" y el triedro "1" tenemos

Al hacer la derivada desde el triedro "1", ahora los vectores  y
y  son
constantes. Entonces
son
constantes. Entonces

Como es lógico, obtenemos el mismo resultado que antes.
2.3 Derivada del vector 

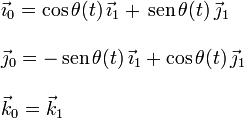
La resolución de este apartado es similar a la anterior. La única diferencia es que ahora la componente del vector también depende del tiempo, por lo que su derivada no es nula. Visto desde el triedro "0" tenemos
Para el sólido "0", el vector sólo cambia por la variación de su longitud.
Visto desde el triedro "1" la derivada es

Ahora hay dos términos de variación, uno asociado al cambio en la longitud del vector (el primer sumando) y otro asociado a la rotación del triedro "0" (el segundo sumando)

