



Cuestión de equilibrio estático, Noviembre 2011
De Laplace
(→Para el punto sin masa A) |
(→Para el punto sin masa A) |
||
| Línea 115: | Línea 115: | ||
<center><math>y_B(t_0)=d\quad\Longrightarrow\quad \Delta x\big\rfloor_{t= t_0}=0 | <center><math>y_B(t_0)=d\quad\Longrightarrow\quad \Delta x\big\rfloor_{t= t_0}=0 | ||
| - | \quad\ | + | \quad\Longrightarrow\quad x_A^{\,\mathrm{eq}\,}\big\rfloor_{t= t_0}=\frac{K_2\!\ d}{K_1+K_2}\quad\Longleftrightarrow\quad f_\mathrm{roz}^{\,\mathrm{eq}\,}\big\rfloor_{t= t_0}=0</math></center> |
Es decir, al anularse la anchura de su intervalo de equilibrio, la partícula <math>A</math> se desplazaría hacia la única posición de equilibrio posible: la correspondiente al caso sin rozamiento. Pero, una vez allí, la fuerza de rozamiento desaparece por lo que, ésta sería también la única posición de equilibrio posible en cualquier instante posterior: | Es decir, al anularse la anchura de su intervalo de equilibrio, la partícula <math>A</math> se desplazaría hacia la única posición de equilibrio posible: la correspondiente al caso sin rozamiento. Pero, una vez allí, la fuerza de rozamiento desaparece por lo que, ésta sería también la única posición de equilibrio posible en cualquier instante posterior: | ||
Revisión de 20:51 30 nov 2011
Contenido |
1 Enunciado

 . Además, una partícula material B, cuya masa tiene un valor m está insertada en el lado vertical
. Además, una partícula material B, cuya masa tiene un valor m está insertada en el lado vertical  de manera que su movimiento está limitado a desplazamientos sobre dicha varilla. Un segundo resorte de longitud natural nula y constante recuperadora K2 conecta la partícula B al punto A. Los valores de los parámetros del sistema son tales que K2d > mg.
de manera que su movimiento está limitado a desplazamientos sobre dicha varilla. Un segundo resorte de longitud natural nula y constante recuperadora K2 conecta la partícula B al punto A. Los valores de los parámetros del sistema son tales que K2d > mg.
- Considerando que los vínculos son perfectamente lisos, determine las posiciones de equilibrio de las partículas A y B.
- Considérese ahora que, mientras que el vínculo en B sigue siendo liso, la partícula sin masa A está sometida a un vínculo rugoso cuya fuerza de rozamiento verifica las leyes del rozamiento seco. ¿Cuáles son las posiciones de equilibrio?
2 Solución
2.1 Equilibrio en el caso de vínculos lisos
2.1.1 Para el punto sin masa A
En la figura se muestra el diagrama de fuerzas que actúan sobre cada una de las partículas susceptibles de moverse en el sistema. Como la partícula A no tiene masa, tampoco habrá una fuerza peso actuando sobre ella y sólo estará sometida a la acción del resorte K1 más la acción del vínculo geométrico liso que sólo le permite moverse a lo largo del lado  . De esta forma, la descripción analítica de una posición arbitraria del punto A, será:
. De esta forma, la descripción analítica de una posición arbitraria del punto A, será:


Comos sabemos, esta acción puede modelarse mediante una fuerza de reacción vincular equivalente, que denominaremos  , y que debe ser perpendicular al desplazamiento permitido de la partícula A. Según el sistema de refererencia cartesiano que estamos utilizando, se tendrá:
, y que debe ser perpendicular al desplazamiento permitido de la partícula A. Según el sistema de refererencia cartesiano que estamos utilizando, se tendrá:

El resorte K1, de longitud natural nula y con un extremo fijo en C, ejerce sobre A una fuerza con la dirección y el sentido del segmento  , y proporcional a su longitud:
, y proporcional a su longitud:

Pero también el resorte K2 actúa sobre esta partícula sin masa con una fuerza que denominaremos  . Como su longitud natural es nula y tine su otro extremo conectado a la partícula B, la correspondiente fuerza será propocional y con igual dirección y sentido que el segmento orientado
. Como su longitud natural es nula y tine su otro extremo conectado a la partícula B, la correspondiente fuerza será propocional y con igual dirección y sentido que el segmento orientado  .
.
![\vec{F}_{AB}=K_2\overrightarrow{AB}=K_2\big[\vec{r}_B(t)-\vec{r}_A(t)\big]](/wiki/images/math/2/5/f/25fc43f4da998edb2916c3a38b00e5a8.png)
Es decir, el valor de esta fuerza depende la posición del punto B. Como, por la acción de un vínculo geométrico liso, éste está obligado a desplazarse siempre sobre el lado vertical , se tendrá:

Una vez determinadas todas las fuerzas que actúan sobre la partícula A, podemos establecer las condiciones para que ésta se encuentre en equilibrio estático; es decir, para que se mantenga en una posición fija. Como sabemos, para que esto ocurra es necesario que se anule la resultante de todas las fuerzas que actúan sobre la partícula:

Proyectando esta ecuación vectorial en las tres direcciones cartesianas, obtendremos la posición de equilibrio para el punto A, así como las componentes de la fuerza de reacción vincular que actúa sobre dicho punto sin masa:




![\displaystyle \Phi_y^A\big\rfloor_{\vec{r}_A^{\ \mathrm{eq}}}=K_2\big[\ d-y_B(t)\ \big]](/wiki/images/math/1/2/e/12e5b6b3c906f3cfdd561a8b06e64bd0.png)

Estos resultados indican que la posición de equilibrio del punto A (su coordenada  , ya que yA = d, al estar vinculada por el lado ) SÓLO DEPENDE de los valores de las constantes recuperadoras de los muelles, K1 y K2. Obsérvese que la partícula A estará en equilibrio en dicha posición sea cual sea la masa o la posición de la partícula B. Incluso, esta partícula puede estar en movimiento, pero A estaría en reposo en la posición de equilibrio que hemos determinado. La segunda de las anteriores ecuaciones nos indica que la fuerza de reacción vincular en el punto A, sí va a depender de la posición de B e, indirectamente, de su masa.
, ya que yA = d, al estar vinculada por el lado ) SÓLO DEPENDE de los valores de las constantes recuperadoras de los muelles, K1 y K2. Obsérvese que la partícula A estará en equilibrio en dicha posición sea cual sea la masa o la posición de la partícula B. Incluso, esta partícula puede estar en movimiento, pero A estaría en reposo en la posición de equilibrio que hemos determinado. La segunda de las anteriores ecuaciones nos indica que la fuerza de reacción vincular en el punto A, sí va a depender de la posición de B e, indirectamente, de su masa.
2.1.2 Para el punto pesado B
Pasemos a analizar el equilibrio de la partícula pesada B. Las fuerzas activas que actúan sobre ella son la fuerza peso y el resorte de constante recuperadora K2. Este último ejercerá una fuerza  que, por el principio de acción y reacción, tendrá igual dirección y módulo que , pero actuando en sentido contrario. Tendremos por tanto:
que, por el principio de acción y reacción, tendrá igual dirección y módulo que , pero actuando en sentido contrario. Tendremos por tanto:

Como ya sabemos, el punto material está obligado a moverse a lo largo del lado , de manera que su coordenada xB tiene un valor constante d, mientras que la yB camibará cuando la partícula se mueva. Introducimos una fuerza de reacción vincular  equivalente a este vínculo geométrico liso:
equivalente a este vínculo geométrico liso:

Para que B se halle en equilibrio es condición necesaria que estas fuerzas se anulen entre sí...

... y ya podemos determinar las coordenadas de la posición de equilibrio de B y el valor de la fuerza de reacción vincular:

![\displaystyle \Phi_x^B\big\rfloor_{\vec{r}_B^{\ \mathrm{eq}}}=K_2\big[\ d-x_A(t)\ \big]=0](/wiki/images/math/0/5/7/0578a8737dbe2b8754cf961da10ab7af.png)


En este caso, la posición de equilibrio de B sólo depende de su propia masa y de las características del resorte al que está conectado (es decir, de K2). Es decir, es independiente de la posición que ocupe la partícula A, incluso del estado cinemático de ésta y, por tanto, no se ve afectada por el resorte K1. Nótese que, dada la relación que guardan los parámetros físicos del sistema, podemos asegurar que la partícula B se encontrará en equilibrio en algún punto del lado vertical , pero excluyendo sus extremos:

Por otra parte, la fuerza de reacción vincular en B sí va a depender de la posición que en un determinado instante puede ocupar la partícula sin masa, A[xA(t),d].
2.2 Equilibrio en el caso de rozamiento en A
2.2.1 Para el punto sin masa A
Ahora, la partícula sin masa A va a estar sometida a un vínculo rugoso que, además del vínculo geométrico considerado en el apartado 2.1.1, incorpora una fuerza que cumple las leyes del rozamiento seco:
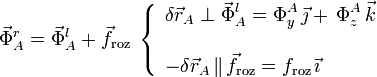
donde el signo de froz indicará el sentido de la fuerza de rozamiento. El resto de fuerzas que actúan sobre A son las mismas que se describieron en el caso de vínculo liso. Nuevamente, la posición de equilibrio de dicho punto está sometida a la condición:


Hay una nueva fuerza, que modificará la ecuación correspondiente a la proyección de esta ecuación vectorial en la dirección del eje OX:


Como sabemos, si la partícula se encuentra en equilibrio estático, el módulo de la fuerza de rozamiento no puede superar un valor límite que depende de la naturaleza del contacto (caracterizado por valor del coeficiente de rozamiento estático μe), y del módulo de la fuerza de reacción que modela el vínculo geométrico:
![\displaystyle |f_\mathrm{roz}^{\,\mathrm{eq}\,}|\leq\mu_e\!\ |\vec{\Phi}_A^l(\vec{r}_A^{\ \mathrm{eq}})|=\mu_e\!\ K_2\big[\ d-y_B(t)\ \big]](/wiki/images/math/0/2/1/0212188cef801fb5d133af05af53f148.png)
Si combinamos esta desigualdad con la primera de las tres ecuaciones algebraicas que proporciona la condición equilibrio, obtenemos que la partícula A se encontrará en equilibrio en un rango de valores de xa en torno a la posición de equilibrio que obtuvimos en ausencia de rozamiento:

![\,\mathrm{con}\,\quad\Delta x=\frac{\mu_e\!\ K_2}{K_1+K_2}\ \big[\!\ d - y_B\!\ \big]](/wiki/images/math/9/e/5/9e59601240dca6c936a1d2f510533e08.png)
Obsérvese que la anchura del rango o intervalo de posiciones en que A se mantendrá en equilibrio, sí va a depender de la posición de B, siendo más ancho cuanto más abajo se encuentre esta partícula y cuanto mayor sea el coeficiente de rozamiento estático en el punto A.
Por otra parte, nótese que si el punto B no está en equilibrio (es decir, yB = yB(t)), el tamaño del rango de posiciones de equilibrio variará en el tiempo. Si en un determinado instante t0, la partícula B alcanzase el punto E, se tendría...

Es decir, al anularse la anchura de su intervalo de equilibrio, la partícula A se desplazaría hacia la única posición de equilibrio posible: la correspondiente al caso sin rozamiento. Pero, una vez allí, la fuerza de rozamiento desaparece por lo que, ésta sería también la única posición de equilibrio posible en cualquier instante posterior:


